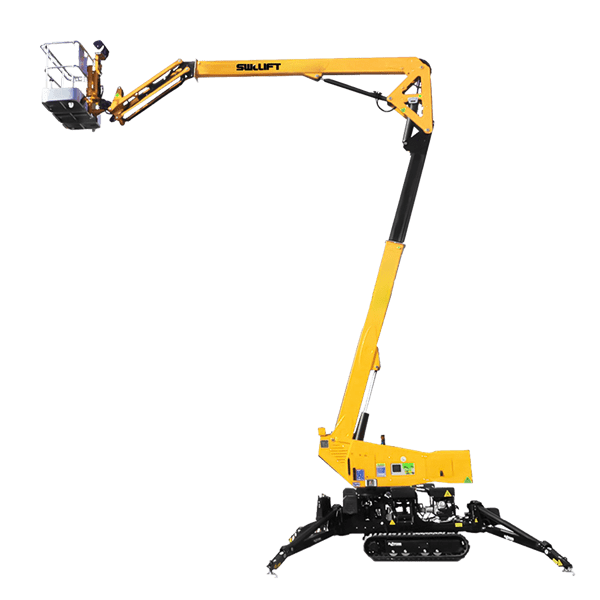
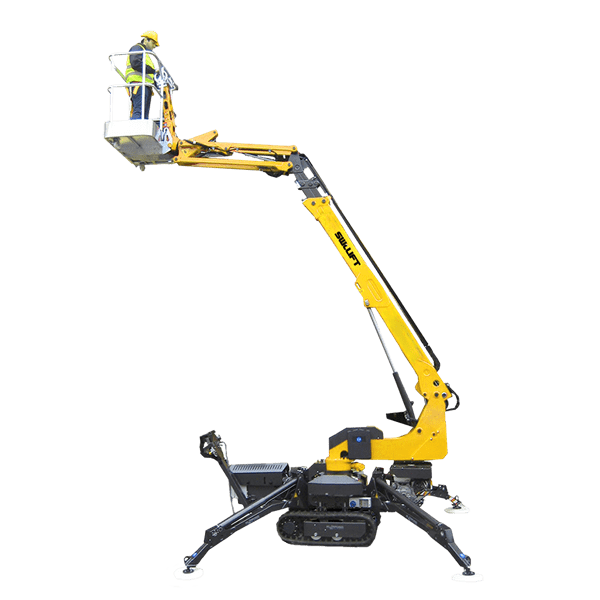
履带式蜘蛛臂高空作业平台是一种集履带底盘和蜘蛛臂(又称多节臂)功能于一体的特种高空作业设备。该平台通常由一个铰接臂和多个可伸缩臂组成,类似于蜘蛛的腿。这些吊臂部分可伸缩并可水平和垂直旋转,以提供多角度工作范围和灵活性。履带式蜘蛛臂高空作业平台通常具有较大的工作范围和悬臂长度,可以在复杂的工作环境中实现更广泛的作业。
与传统的剪叉式高空作业平台或直臂高空作业平台不同,履带式蜘蛛臂高空作业平台还配备了履带式底盘系统,类似于履带式挖掘机或推土机。其底盘设计提供了增强的机动性和稳定性,使平台能够在不平坦的地面、斜坡、狭窄的通道和其他复杂的工作场地上移动。