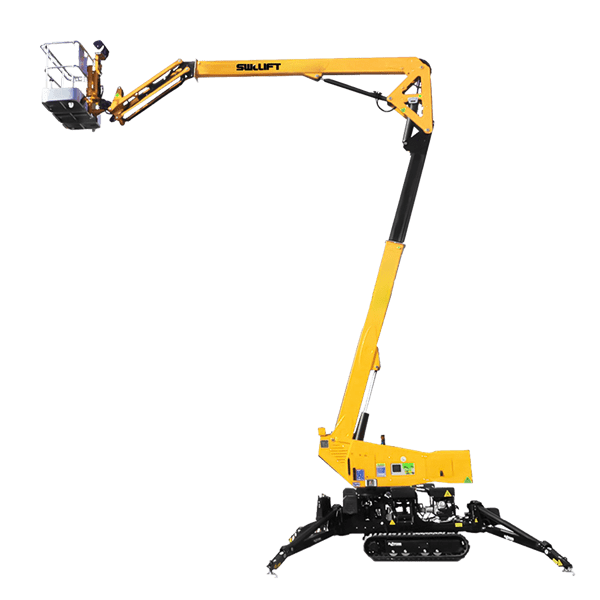
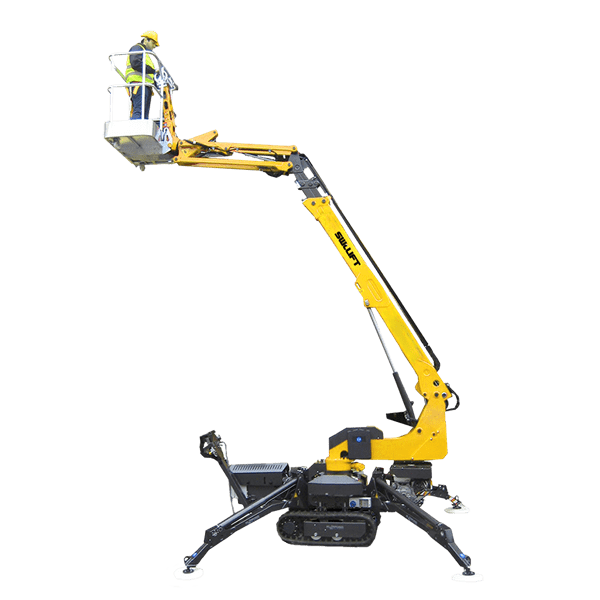
履带式蜘蛛臂高空作业平台,也称为履带式蜘蛛臂高空作业平台或履带式铰接式高空作业平台,是一种专门类型的高空作业平台,专为在具有挑战性的越野环境中进行高处作业而设计。这种类型的臂架高空作业平台结合了蜘蛛臂式升降机的特点,通常具有紧凑和轻量的设计,以及类似于挖掘机或推土机等建筑设备上的履带式底盘系统。
履带式底盘系统由履带组成,可提供增强的机动性和稳定性,使蜘蛛臂式升降机能够穿越崎岖或不平坦的地形,包括斜坡、砾石、泥浆和其他具有挑战性的表面。轨道使升降机能够穿过密闭空间、穿越障碍物并进入传统轮式动臂升降机难以到达的工作区域。